2.mpu6050;
然后用写好的模拟i2c函数读取mpu6050,根据mpu6050手册的各寄存器地址,读取到了重力加速计和陀螺仪的各分量;
传感器采样率设置为200Hz,这个值是因为我电调频率为200Hz,也就是说,我的程序循环一次0.005s,一般来说,采样率高点没问题,别比执行一次闭环控制的周期长就行了;
陀螺仪量程±2000°/s,加速计量程±2g, 量程越大,取值越不精确;
这里注意,由于我们没有采用磁力计,而陀螺仪存在零偏,所以最终在yaw方向上没有绝对的参考系,不能建立绝对的地理坐标系,这样最好的结果也仅仅是在yaw上存在缓慢漂移。
3.互补滤波;
融合时,陀螺仪的积分运算很大程度上决定了飞行器的瞬时运动情况,而重力加速计通过长时间的累积不断矫正陀螺仪产生的误差,最终得到准确的机体姿态。
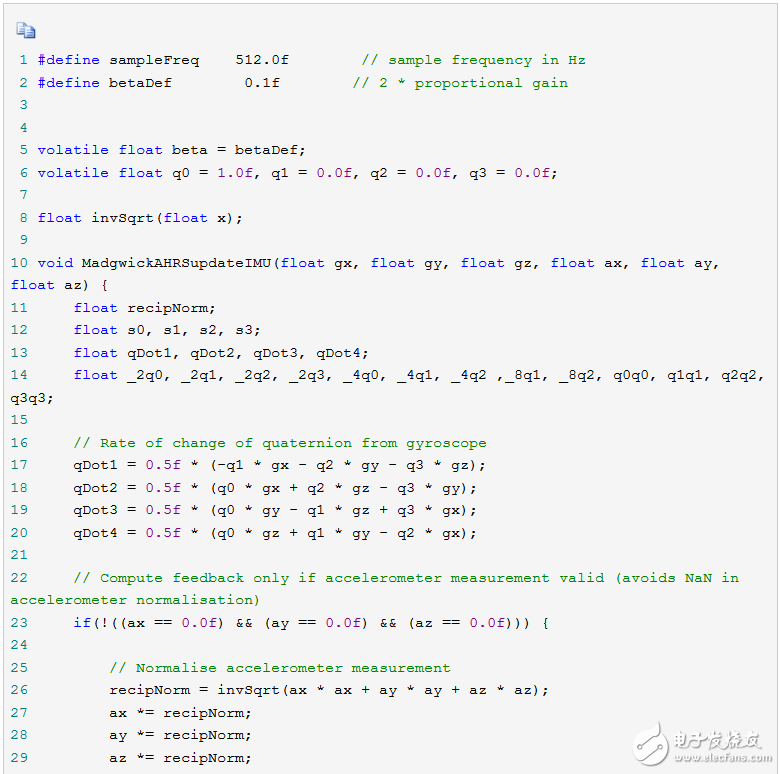
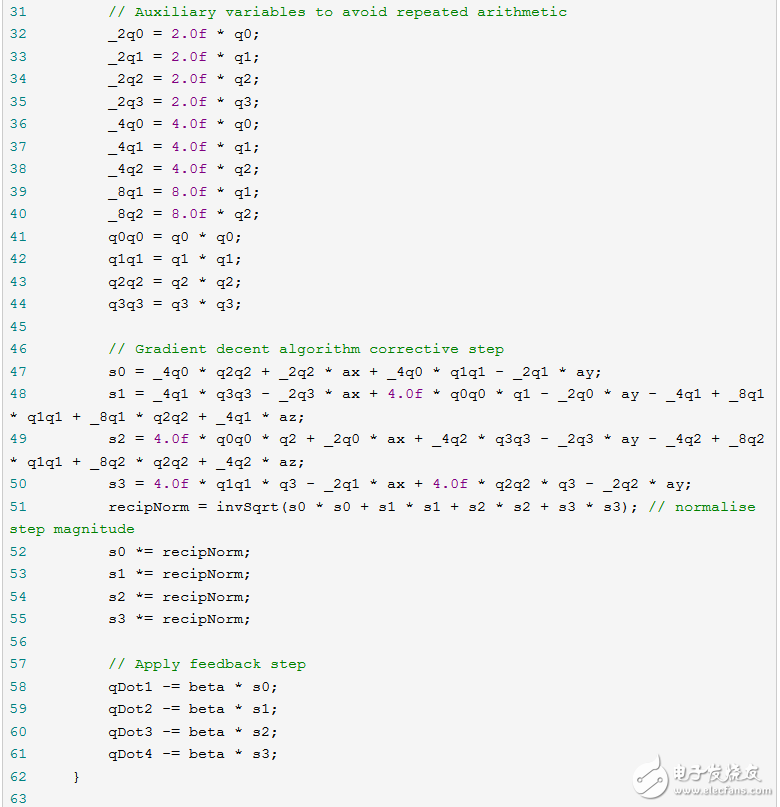
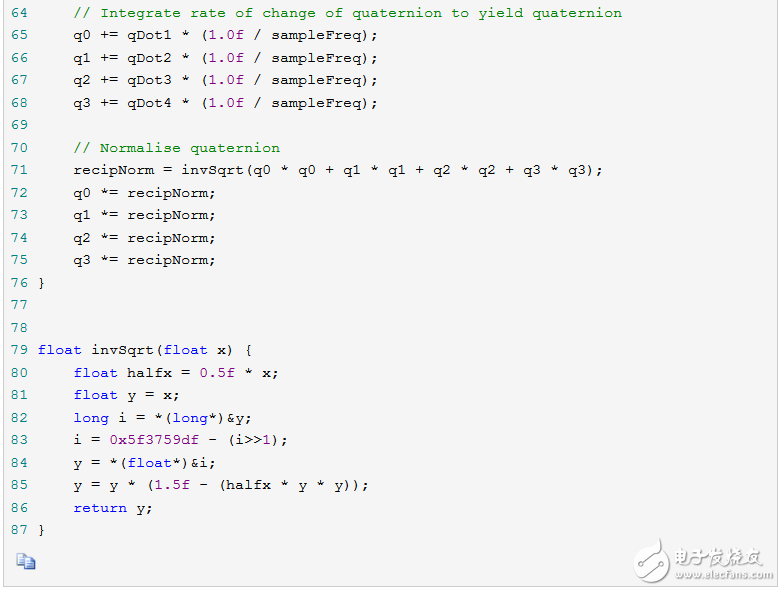
这里我们采用Madgwick提供的UpdateIMU算法来得到姿态角所对应的四元数,之后只需要经过简单运算便可转换为实时欧拉角。感谢Madgwick大大为开源做出的贡献。
评 论
请勿进行人身攻击,谩骂以及任何违法国家相关法律法规的言论。
正在加载评论...