Kittenbot基础套件包内配置了机器人项目中常用的3种执行器,两个直流电机,两个步进电机还有一个舵机,掌握这三种执行器的特点与控制方法基本就可以应对绝大部分机器人项目中的运动问题。

把超声波测距超声波传感器安装到超声波桥接器并拧好自攻螺丝

安装舵机和超声波模块。舵机从车底探入,超声波模块连接方形底座,通过自攻螺丝固定舵机和超声波模块的相对位置。
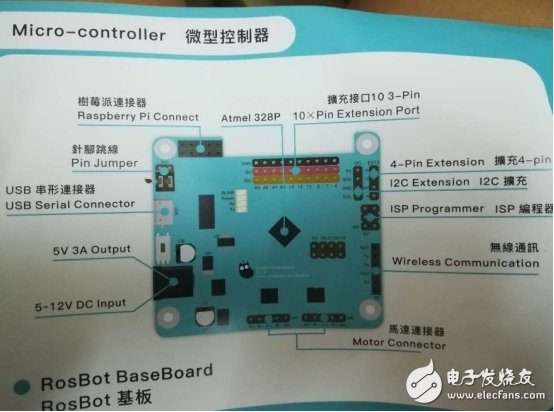

Ateml的主控芯片,CH340 USB转TTL、两个双H桥点击驱动芯片(所以此主控板可以驱动4个直流小电机或者2个4线步进电机。)
评 论
请勿进行人身攻击,谩骂以及任何违法国家相关法律法规的言论。
正在加载评论...