车身角度获取
选用的传感器为模拟量输出,因此只需要用单片机的AD采集数据后计算出角度值即可,需要注意的是,采集后 的数据直接使用效果会很糟糕。需要再次进行滤波计算,得到一个准确、及时、抗扰动的真实角度数据。调速过程中可以用串口将数据输出,辅助调试。这里就是简 单的PID控制车轮转速,如果不记得就百度看看。调试参数会花点时间,刚开始参数别调过大,否则抖动起来有危险!另外需要设置角度过大停机的功能。转向数 据为采集转向电位器而来,采集后的数据进行滤波处理后再用。转向中间设置一个无效的死区,也是防止误动作。
散热器:

遥控和语音模块

控制程序部分
果壳网友们的素质都很高,这里就提一些关键部分。一些个人认为有用的代码附在最后。
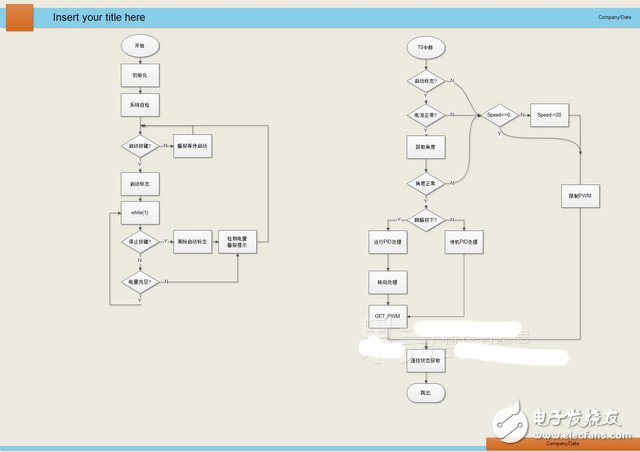
流程图
遥控

硬件原先选用18b20,很是遗憾这部分程序没调通,可能原因1:系统必须有多处中断,并且中断服务程序比较多,因而打乱了18b20的时序,加上没有示波器,因而没调通。可能原因2:智商问题。尝试调试了近2小时无果后改用模拟量温度芯片LM35D($0.5750),电压直接由电阻分压而来。其余部分可自由发挥。
友情提示:此车有一定危险性,不排除摔倒、失控等问题,在空地上玩玩就好,打算用来代步上班的,请给自己买好保险!
评 论
请勿进行人身攻击,谩骂以及任何违法国家相关法律法规的言论。
正在加载评论...