Step 2: 项目预览
顶层设计,主要分为三个主要组成部分:
1. 计算机与跳跃运动控制器 -----用于将数据发布到网上。
2. “盒子”里的树莓派- ---从网上订阅数据。
3. PubNub - 通讯层安全地连接这些东西。

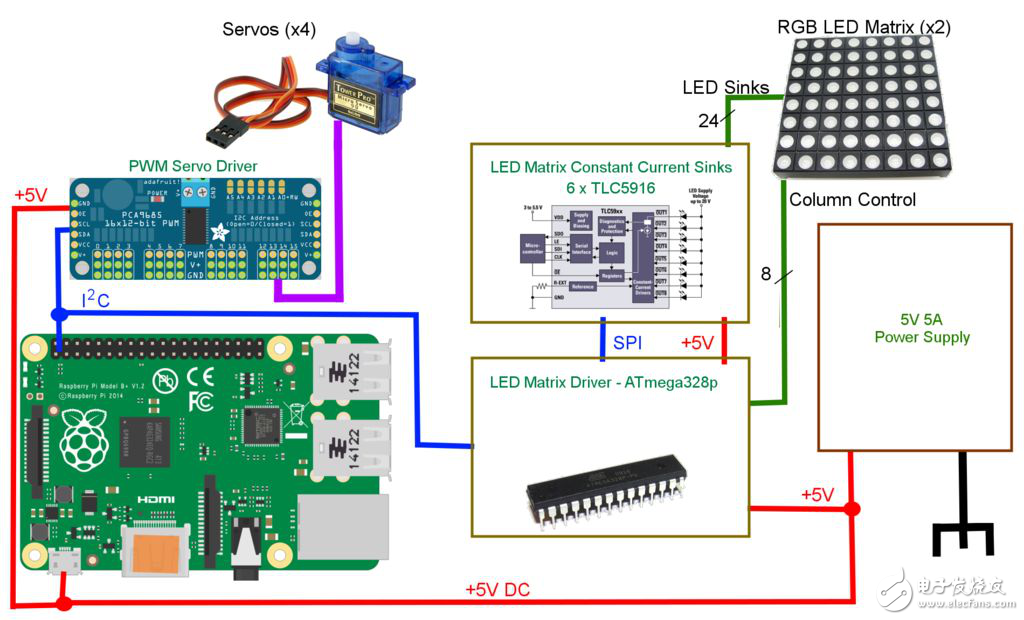
计算机部分是很简单的,但在“盒子”有更多一点事。。。
1. 树莓派 - 主控制器,采用采用I2C总线通信
2. ATMEGA328P矩阵驱动电路 - 通过I2C总线接收命令,控制28&TImes;8矩阵RGB
3. 基于TLC5916 LED的电路 -- 由ATMEGA328P控制,水槽LED矩阵电流
4. Adafruit PWM驱动器 -----通过I2C总线,驱动4舵机接收命令
5. 5V,5A电源
首先,我们需要设置用户计算机便于使用跳跃运动控制器。
Step 3:Java和跳跃运动控制器设置

Java 设置
我们将使用Java SDK的跳跃运动控制器,因此只需要安装Java开发工具包,其中包括Java运行环境。这是非常简单的,只要根据您的操作系统选择正确的程序包。
不是创建一个安装包,而是直接从Java IDE中运行的源代码。这可以让你自己操作代码,修改,学习!当安装JDK后,你需要一个好的IDE(也就是集成开发环境)。一些常见的诸如Eclipse中的IntelliJ,和NetBeans。你可以随便选一个。每个使用者建立的库是不同的,所以你必须要参考文档了解如何设置一个新的项目!
Java 源代码
只有一个java文件需运行代码,但是也必须安装跳跃运动和PubNub Java库。。。 GitHub的项目库包含一些非常必要的Java文件。
Leap 设置
设置跳跃可有点棘手,并且这个会根据系统不同而不同,而不是逐步完成的。这里不是通过告诉你我如何做到的,而是逐步引导您到相应的文章。哪个地方不懂,可以随时寻求帮助。
1. 下载SDK,驱动程序,和跳跃运动中的应用。
2. 安装跳跃应用,这将会安装任何必要的驱动程序和进程。
3. 运行跳跃运动诊断可视化工具,以确保跳跃的工作。
4. 浏览Java SDK文档,尤其是设置项目。
PubNub 设置
最后一步是下载PubNub Java SDK的,文档页面会讲到如何将库添加到Java项目。
评 论
请勿进行人身攻击,谩骂以及任何违法国家相关法律法规的言论。
正在加载评论...