Step 5:树莓派安装

随着Java代码的工作,是时候来设置树莓派订阅数据,并用它来驱动LED和舵机。在已经配置了树莓派有工作的互联网连接,可以是WiFi或以太网,但这部分需要你来完成!如果你需要帮助,可以在PubNub上找找看(前一段时间有人写了一篇)。此外,你可以使用显示器和键盘直接在Pi上完成任何一个步骤,或用SSH远程登录。无论哪种方式都可以,但该项目的最终目标是拥有一个独立的,无头,安装程序会自动运行启动所需的文件。
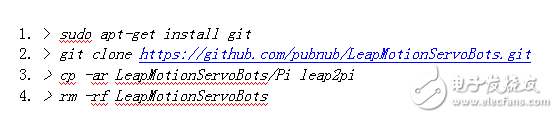
第一步骤是在安装PubNub Python的SDK。
打开终端,安装以下内容:

嗯,这是很简单的!现在,我们需要得到所有在GitHub的资源库的皮目录中的文件的副本。要做到这一点最简单的方法是使用Git克隆回购,然后删除其他不需要的东西:
现在,leap2pi目录的内容应该与GitHub库Pi目录中的文件相同。最后,我们希望Python脚本在启动运行。这里有两个Python脚本要运行:

这是很简单的,我们只需要编辑一个Linux系统文件作为根用户。首先,确保脚本是可执行的,然后打开rc.local文件进行编辑。
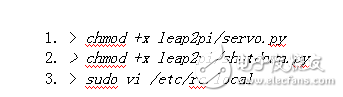
你可以使用任何你喜欢的编辑,我更喜欢VI。该文件的最后一行应该是“exit 0”,即是允许使用该文件的清洁出口和击终端的初始化。这里可以添加任意数量的命令,只要它们运行最后的“exit”命令。
插入以下,正上方的“exit 0”命令:
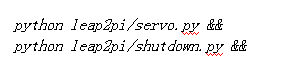
保存文件,退出,并在开机后,Pi会自动运行这些脚本。而“&&”部分确保每一个命令运行。如果你离开了关,在bash终端将永远载入,所以你会被无限期地锁定您的个人信息的!
评 论
请勿进行人身攻击,谩骂以及任何违法国家相关法律法规的言论。
正在加载评论...